

How to burn lots of cash and kill yourself trying to do something that
was around in 1966.
The answer is yes. You can make a magnetic levitator out of digital
electronics. Unfortunately, despite being stable enough to suspend
objects in mid air, it's too unstable to translate the objects over
time, and hence completely useless.
Most levitators work by sensing the position of a permanent magnet
floating in air with a hall effect sensor mounted below the
electromagnet. The electromagnet constantly adjusts its power to keep
the permanent magnet floating.
The levitators on the internet are all expensive and analog because #1
most people aren't very good at writing software, #2 it's hard to
justify getting a microcontroller working for something so simple and
#3 magnetic levitation is more stable with intermediate field strength,
rather than on or off. Unfortunately, we have many gadgets and can't
afford a dedicated set of discrete components for every gadget. The
digital circuit is a single circuit that does everything.
The limit with the levitator is the inability to react to height
changes exactly when they happen. No matter how hard you try, no
matter how tough you are, your feedback loop always lags in a way which
amplifies over time. The solution for analog levitators is to use more
magnet voltage than required when the object is shaking fast and just
enough magnet voltage when the object is shaking slow.
Since digital levitators can't change magnet voltage, their solution is
to guess where the object is based on the speed of the object. If the
object is moving down fast, subtract a little from the detected
height. If it's moving up fast, add a little to the detected
height.
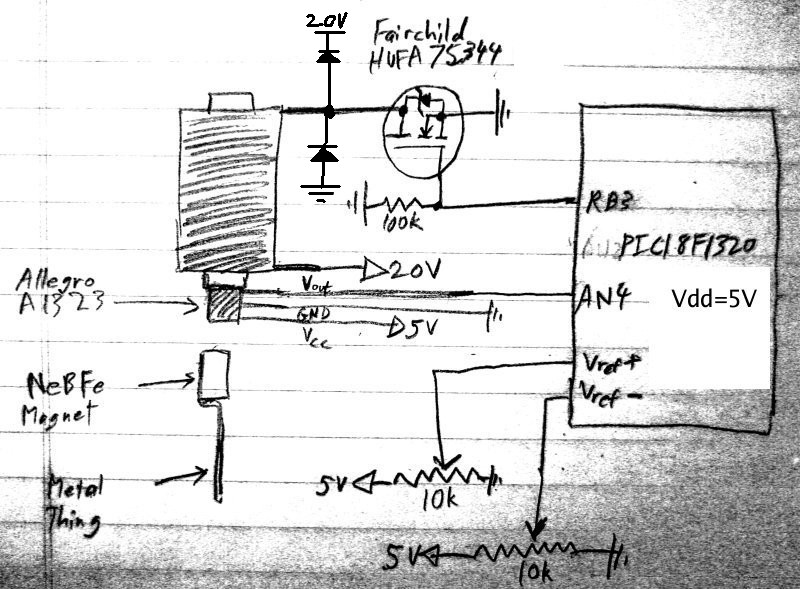
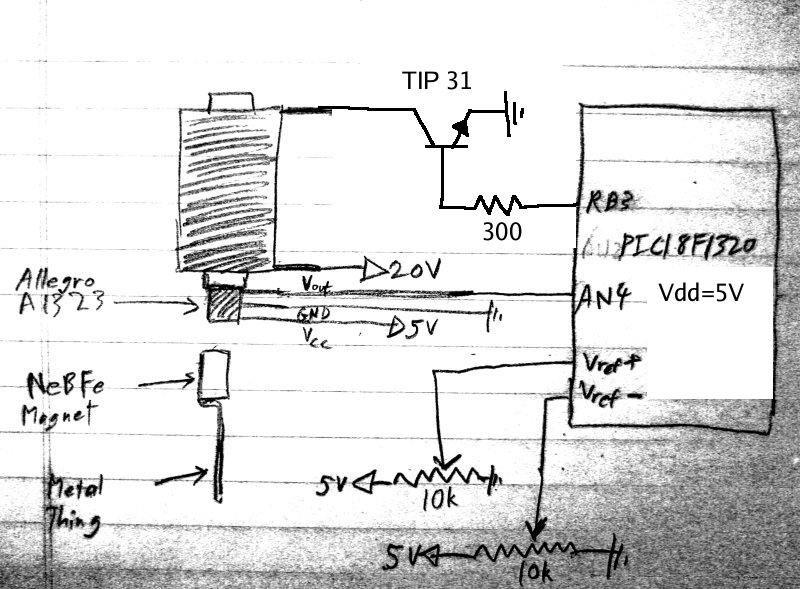
This schematic shows specific parts in the simplest digital
levitator. The method by which you program the microprocessor
determines what extra connections it needs. This circuit requires
running a PIC18F1320 at 40Mhz.
A large BJT can be more durable than the MOSFET but less efficient.
Small BJT's won't do it because the inductance is too high. A full
H-bridge can increase margins by providing some pushing force if the
object gets too high, but isn't necessary either.
The hall effect sensor is very fragile. One got destroyed by the
USPS. The more sensitive the hall effect sensor is, the better.
Not much to see in the real thing. Here's the source code.
The source code is useless unless you use gpasm, exactly the same
programmer, and exactly the same bootloader we use, but it gives you an
idea how the algorithm is done in PIC18F1320 assembly language. This
source code only damps based on falling speed, not rising speed.
A $2 magnet from Radioshack is lifted.
The electromagnet retains a lot of flux when it's off and it saturates
the hall effect sensor when it's on. The solution is to pulse the
electromagnet and take height readings when it's off.
Finally, have a movie of different objects being levitated by different
algorithms. One of the levitations was an algorithm that changed
height periodically, but only the tiniest amount, and it eventually
failed.
Here we have a method for winding very large electromagnets with a hand
drill and a crotch. The trick is to use balsa as temporary end pieces
and tape the wire to the balsa. The drill must be capable of very slow
RPM. The magnet wire doesn't need to be wound perfectly, just evenly
enough to look like a cylinder. The balsa can be ripped off when
finished.
Removing the bolt head does nothing unless you use the H-bridge to
repell. Coreless electromagnets don't work because the flux is too
widely spaced.
The most practical use of levitators is agitating fluid since there are
no parts to wear out and there is no noise. Fluid agitation in mid air
is very hard. We achieved contact lens agitation with TIP100
transistors in the H bridge and a 20V power supply. For agitation, the
least sensitive hall effect sensor was better because the gap under the
electromagnet needed to be as small as possible.
Unfortunately this effect required perfectly matched weight, temperature
and levitation height. It would never be practical for daily changes in
the parameters. Most likely the hall effect sensor isn't fast enough to
track an oscillating object and the only reason this worked at all was
by matching the resonant frequency exactly.
DIGITAL MAGNETIC LEVITATOR
or



 38 MB
38 MB
Fluid agitation
 1280x720 8 MB movie
1280x720 8 MB movie